最短路径算法——Dijkstra算法
Dijkstra算法在刚开始在学数据结构的时候,完全没弄明白,主要是也不怎么想去弄明白。而从学校出来到现在,最短路径算法都没有实际运用过,最近在一个GIS项目中总算用到了,于是乎把教材重温了下,同时查阅了网上一些资料,借鉴了一些别人的东西,并顺利用写进了项目中,文中的主要代码来自于园子里的一位大哥,这位大哥对通用框架的研究很深入,他的链接为:http://zhuweisky.cnblogs.com/archive/2005/09/29/246677.html(最短路径)。另外,文章的最后面的一些链接是我找资料的时候用到过的,有兴趣
的朋友可以去看看。
最短路径分析在事故抢修、交通指挥、GPS导航等行业应用中使用的非常广泛, 以至于大多数GIS平台都会把这个分析功能作为一个最基础的功能集成进去,如ARCGIS,SuperMap等。个人感觉想要了解这个算法的来龙去脉,一方面是参与相关书籍仔细理解,另外一个最重要的是要去调试代码。由于历史原因,对于书上的伪C代码,我是完全不感兴趣的,而且由于有严格的数学证明,所以看起来相对较难,而对于面向对象实现的算法,我很感兴趣,也感觉很容易理解,所以一边针对C#实现的面向对象代码再一边对照书籍,感觉理解的层次就加深了。
Dijkstra算法又称为单源最短路径,所谓单源是在一个有向图中,从一个顶点出发,求该顶点至所有可到达顶点的最短路径问题。要顺利实现算法,要求理解Dijstra的算法,同时还要理解图的一些基本概念,图由节点和边构成,将节点和边看成对象,每个对象有自己的特有属性,如在GIS中,一个节点必须都有ID,横坐标,纵坐标等基本属性,边有起点节点,终点节点,长度等属性,而最短路径分析,就是根据边的长度(权值)进行分析的。
边的定义如下:
publicclassEdge
{
publicstringStartNodeID;
publicstringEndNodeID;
publicdoubleWeight;//权值,代价
}
节点的定义:
publicclassNode
{
privatestringiD;
privateList<Edge>edgeList;//Edge的集合--出边表
publicNode(stringid)
{
this.iD=id;
this.edgeList=newList<Edge>();
}
#regionproperty
publicstringID
{
get
{
returnthis.iD;
}
}
publicList<Edge>EdgeList
{
get
{
returnthis.edgeList;
}
}
#endregion
}
本次用于分析的拓扑图如下:(A为起点,D为终点,边上的数字为权值)
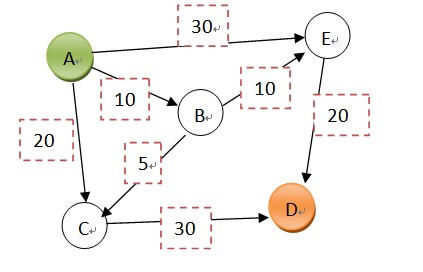
利用上述的边与节点的定义,可以通过代码简单的构成如下图:

publicclassGraph
{
publicList<Node>m_nodeList=null;
publicGraph()
{
m_nodeList=newList<Node>();
}
///<summary>
///获取图的节点集合
///</summary>
publicList<Node>NodeList
{
get{returnthis.m_nodeList;}
}
///<summary>
///初始化拓扑图
///</summary>
publicvoidInit()
{
//*****************BNode*******************
NodeaNode=newNode("A");
m_nodeList.Add(aNode);
//A->B
EdgeaEdge1=newEdge();
aEdge1.StartNodeID=aNode.ID;
aEdge1.EndNodeID="B";
aEdge1.Weight=10;
aNode.EdgeList.Add(aEdge1);
//A->C
EdgeaEdge2=newEdge();
aEdge2.StartNodeID=aNode.ID;
aEdge2.EndNodeID="C";
aEdge2.Weight=20;
aNode.EdgeList.Add(aEdge2);
//A->E
EdgeaEdge3=newEdge();
aEdge3.StartNodeID=aNode.ID;
aEdge3.EndNodeID="E";
aEdge3.Weight=30;
aNode.EdgeList.Add(aEdge3);
//*****************BNode*******************
NodebNode=newNode("B");
m_nodeList.Add(bNode);
//B->C
EdgebEdge1=newEdge();
bEdge1.StartNodeID=bNode.ID;
bEdge1.EndNodeID="C";
bEdge1.Weight=5;
bNode.EdgeList.Add(bEdge1);
//B->E
EdgebEdge2=newEdge();
bEdge2.StartNodeID=bNode.ID;
bEdge2.EndNodeID="E";
bEdge2.Weight=10;
bNode.EdgeList.Add(bEdge2);
//*****************CNode*******************
NodecNode=newNode("C");
m_nodeList.Add(cNode);
//C->D
EdgecEdge1=newEdge();
cEdge1.StartNodeID=cNode.ID;
cEdge1.EndNodeID="D";
cEdge1.Weight=30;
cNode.EdgeList.Add(cEdge1);
//*****************DNode*******************
NodedNode=newNode("D");
m_nodeList.Add(dNode);
//*****************ENode*******************
NodeeNode=newNode("E");
m_nodeList.Add(eNode);
//E->D
EdgeeEdge1=newEdge();
eEdge1.StartNodeID=eNode.ID;
eEdge1.EndNodeID="D";
eEdge1.Weight=20;
eNode.EdgeList.Add(eEdge1);
}
}
有了拓扑节点和边,就可以根据算法构造其他最短路径分析的对象了,主要步骤如下:
Ø初始化图中的从A出发的路径集合:
///<summary>
///PlanCourse缓存从源节点到其它任一节点的最小权值路径(路径表)
///</summary>
publicclassPlanCourse
{
privateHashtablehtPassedPath;
#regionctor
publicPlanCourse(List<Node>nodeList,stringoriginID)
{
this.htPassedPath=newHashtable();
NodeoriginNode=null;
foreach(NodenodeinnodeList)
{
if(node.ID==originID)
{
originNode=node;
}
else
{
PassedPathpPath=newPassedPath(node.ID);
this.htPassedPath.Add(node.ID,pPath);
}
}
if(originNode==null)
{
thrownewException("Theoriginnodeisnotexist!");
}
this.InitializeWeight(originNode);
}
///<summary>
///通过指定节点的边的权值初始化路径表
///</summary>
///<paramname="originNode"></param>
privatevoidInitializeWeight(NodeoriginNode)
{
if((originNode.EdgeList==null)||(originNode.EdgeList.Count==0))
{
return;
}
foreach(EdgeedgeinoriginNode.EdgeList)
{
PassedPathpPath=this[edge.EndNodeID];
if(pPath==null)
{
continue;
}
pPath.PassedIDList.Add(originNode.ID);
pPath.Weight=edge.Weight;
}
}
#endregion
///<summary>
///获取指定点的路径表
///</summary>
///<paramname="nodeID"></param>
///<returns></returns>
publicPassedPaththis[stringnodeID]
{
get
{
return(PassedPath)this.htPassedPath[nodeID];
}
}
}
Ø从A中最短路径集合中找到一个最短的路径点Vi开始分析
///<summary>
///从PlanCourse取出一个当前累积权值最小,并且没有被处理过的节点
///</summary>
///<returns></returns>
privateNodeGetMinWeightRudeNode(PlanCourseplanCourse,List<Node>nodeList,stringoriginID)
{
doubleweight=double.MaxValue;
NodedestNode=null;
foreach(NodenodeinnodeList)
{
if(node.ID==originID)
{
continue;
}
PassedPathpPath=planCourse[node.ID];
if(pPath.BeProcessed)
{
continue;
}
if(pPath.Weight<weight)
{
weight=pPath.Weight;
destNode=node;
}
}
returndestNode;
}
Ø修正从A出发至Vi最短路径,并重新选择另一个最短路径点Vj点开始分析,重新执行上述步骤的路径分析
while(curNode!=null)
{
PassedPathcurPath=planCourse[curNode.ID];
foreach(EdgeedgeincurNode.EdgeList)
{
PassedPathtargetPath=planCourse[edge.EndNodeID];
doubletempWeight=curPath.Weight+edge.Weight;
if(tempWeight<targetPath.Weight)
{
targetPath.Weight=tempWeight;
targetPath.PassedIDList.Clear();
for(inti=0;i<curPath.PassedIDList.Count;i++)
{
targetPath.PassedIDList.Add(curPath.PassedIDList[i].ToString());
}
targetPath.PassedIDList.Add(curNode.ID);
}
}
//标志为已处理
planCourse[curNode.ID].BeProcessed=true;
//获取下一个未处理节点
curNode=this.GetMinWeightRudeNode(planCourse,nodeList,originID);
}
Ø重复上述两个步骤,一直到所有的对象都分析完为止。
Ø这个时候的路径集合表中已经保存了从A到任意一点的最短路径集合了。
///<summary>
///从PlanCourse表中取出目标节点的PassedPath,这个PassedPath即是规划结果
///</summary>
///<returns></returns>
privateRoutePlanResultGetResult(PlanCourseplanCourse,stringdestID)
{
PassedPathpPath=planCourse[destID];
if(pPath.Weight==int.MaxValue)
{
RoutePlanResultresult1=newRoutePlanResult(null,int.MaxValue);
returnresult1;
}
string[]passedNodeIDs=newstring[pPath.PassedIDList.Count];
for(inti=0;i<passedNodeIDs.Length;i++)
{
passedNodeIDs[i]=pPath.PassedIDList[i].ToString();
}
RoutePlanResultresult=newRoutePlanResult(passedNodeIDs,pPath.Weight);
returnresult;
}
最短路径的结果类定义如下:
publicclassRoutePlanResult
{
publicRoutePlanResult(string[]passedNodes,doublevalue)
{
m_resultNodes=passedNodes;
m_value=value;
}
privatestring[]m_resultNodes;
///<summary>
///最短路径经过的节点
///</summary>
publicstring[]ResultNodes
{
get{returnm_resultNodes;}
}
privatedoublem_value;
///<summary>
///最短路径的值
///</summary>
privatedoubleValue
{
get{returnm_value;}
}
}
分享到:





相关推荐
最短路径算法——Dijkstra算法参照.pdf
算法这么课程的结课论文,以最短路径算法为例描述贪心算法
最短路径算法dijkstra讲解,另外还包含了自动驾驶学习资料的获取: 涵盖感知,规划和控制,ADAS,传感器; 1. apollo相关的技术教程和文档; 2.adas(高级辅助驾驶)算法设计(例如AEB,ACC,LKA等) 3.自动驾驶鼻祖...
Modify Dijkstra’s algorithm, so that it finds the hop lengths of the shortest paths from a given node s to all other nodes in a given undirected connected graph G. Note that : • find the shortest ...
设计和实现了单元最短路径的算法——dijkstra算法,使用的编程语言是java.
NULL 博文链接:https://feng2010.iteye.com/blog/1175366
本光盘中包含以下五部分内容。 1. 电子教案。 本课件共10个Powerpoint文件(每章一个)。教师可根据教学要求自由修改此教案(增加或删减内容),但不能自行出版销售。...3.6 附录E:最短路径算法——Dijkstra算法
谢希仁计算机网络的第六版光盘内容,光盘中包含以下五部分内容。 1. 电子教案。 本课件共10个Powerpoint文件(每章一个)。教师可根据教学要求自由修改此教案(增加或删减...3.6 附录E:最短路径算法——Dijkstra算法
本节内容王道考研/CSKAOYAN.COM最短路径王道考研/CSKAOYAN.COM迪杰斯特拉• 提出“goto 有害理论”——操作系统,虚拟存储技术• 信号量
本文实例讲述了Python数据结构与算法之图的最短路径(Dijkstra算法)。分享给大家供大家参考,具体如下: # coding:utf-8 # Dijkstra算法——通过边实现松弛 # 指定一个点到其他各顶点的路径——单源最短路径 # 初始...
有好多 个经典的算法算法和例子 应该值这么多分数的
包含图论众多热点问题:最短路径——Dijkstra SPFA Floyd等 最小生成树的两种计算方法、三种中心度、连通分量的计算 输入文件格式按照graph_movie.txt
博客:MATLAB轻松绘制地图路线——Dijkstra(迪杰斯特拉)算法最短路径规划 所用工程文件
一心想学习算法,很少去真正静下心来去研究,前几天趁着周末去了解了最短路径的资料,用python写了一个最短路径算法。算法是基于带权无向图去寻找两个点之间的最短路径,数据存储用邻接矩阵记录。首先画出一幅无向图...
结构的基础上依靠GIS技术的支持,采集了大量具体道路信息,采用Dijkstra算法实现了快速最短路径搜索。根 据城市的交通状况对交通网络图的边值赋予不同的权值可实现最优路径搜寻,给出了一个搜索实例—— 一个包 含61...
Dijkstra算法(单源最短路径) 单源最短路径问题,即在图中求出给定顶点到其它任一顶点的最短路径。在弄清楚如何求算单源最短路径问题之前,必须弄清楚最短路径的最优子结构性质。
该压缩文件中包含动态规划,合并排序与快速排序算法,回溯,求最大字段和(穷举法、动态规划、分治法),求最小生成树(Prim算法与Kruskal算法与并查集),贪心算法,最短路径问题——基于Dijkstra算法和Floyd算法的...
算法分类:排序算法(如冒泡排序、快速排序、归并排序),查找算法(如顺序查找、二分查找、哈希查找),图论算法(如Dijkstra最短路径算法、Floyd-Warshall算法、Prim最小生成树算法),动态规划,贪心算法,回溯法...